Il s'agit d'un robot mBot du commerce.Il est doté d'une carte électronique programmable. Celle-ci peut être programmée ou télé-opérée grâce à un ordinateur soit par fil (port USB), soit par Wifi.On utilisera le logiciel « mBlock» pour créer nos programmes. Le langage graphique utilisé est Scratch.

MBot est livré démonté dans sa boite avec tous les éléments nécessaires à l'assemblage.
Il faut compter 15 min pour assembler le robot.


Le montage de robot MBot est très simple et très rapide. Le fabriquant propose un shéma de montage qui décrit les étapes du montage.
Pour monter votre robot un petit tournevis vous est fourni dans la boîte qui contient le kit.
Conseil :
Les robots mis à disposition dans votre atelier est déjà assemblé et prêt à l'emploi avec une batterie rechargeable.
Une fois le kit assemblé, vous obtenez un ensemble :
- Robot,
- Télécommande,
- Clé Wifi pour communiquer avec l'ordinateur.

Ce robot se programme avec un logiciel spécifique "MBlock" qui ressemble tout à fait à Scratch.

La carte électronique
Il s'agit d'une carte type "Arduino" modifiée.
Il existe 2 versions :
- Version Bluetooth
- Version Wifi (celle que nous vous proposons)
Cette carte est composée de, en autre :
1- Bouton poussoir
2- Capteur infrarouge pour recevoir les informations de la télécommande
3- Capteur de luminosité
4- Buzzer
5- LED (Diode électroluminescentes) changeant de couleur en fonction du programme
6- Interrupteur ON/OFF pour allumer et éteindre le robot.

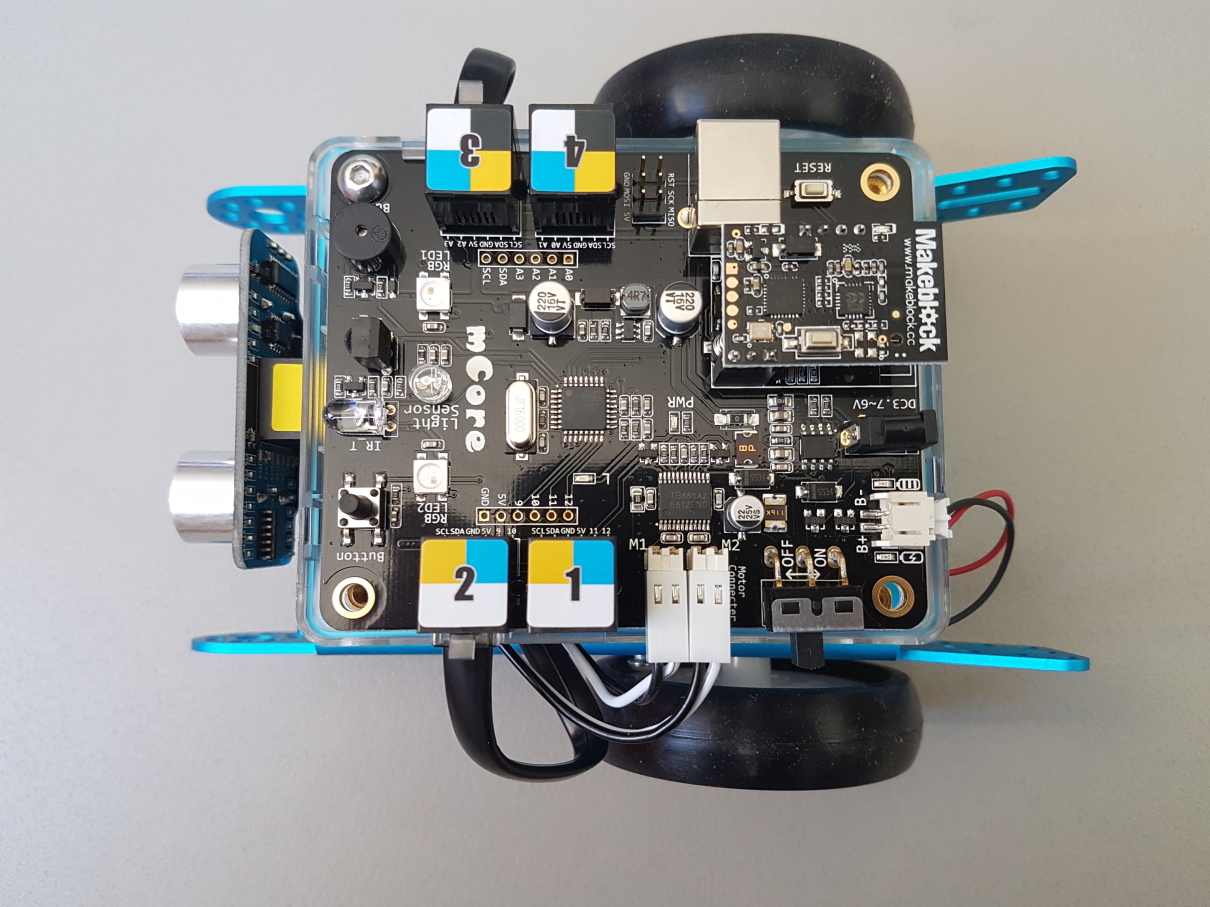
Les ports et boutons
Sur le côté droit :
1- un accès au bouton "Reset" pour réinitialiser le robot
2- Le Port USB pour charger la batterie et téléverser le programme
3- 2 ports RJ25 (n°3, utilisé par le capteur à ultra son et n°4 disponible pour des modules supplémentaires)

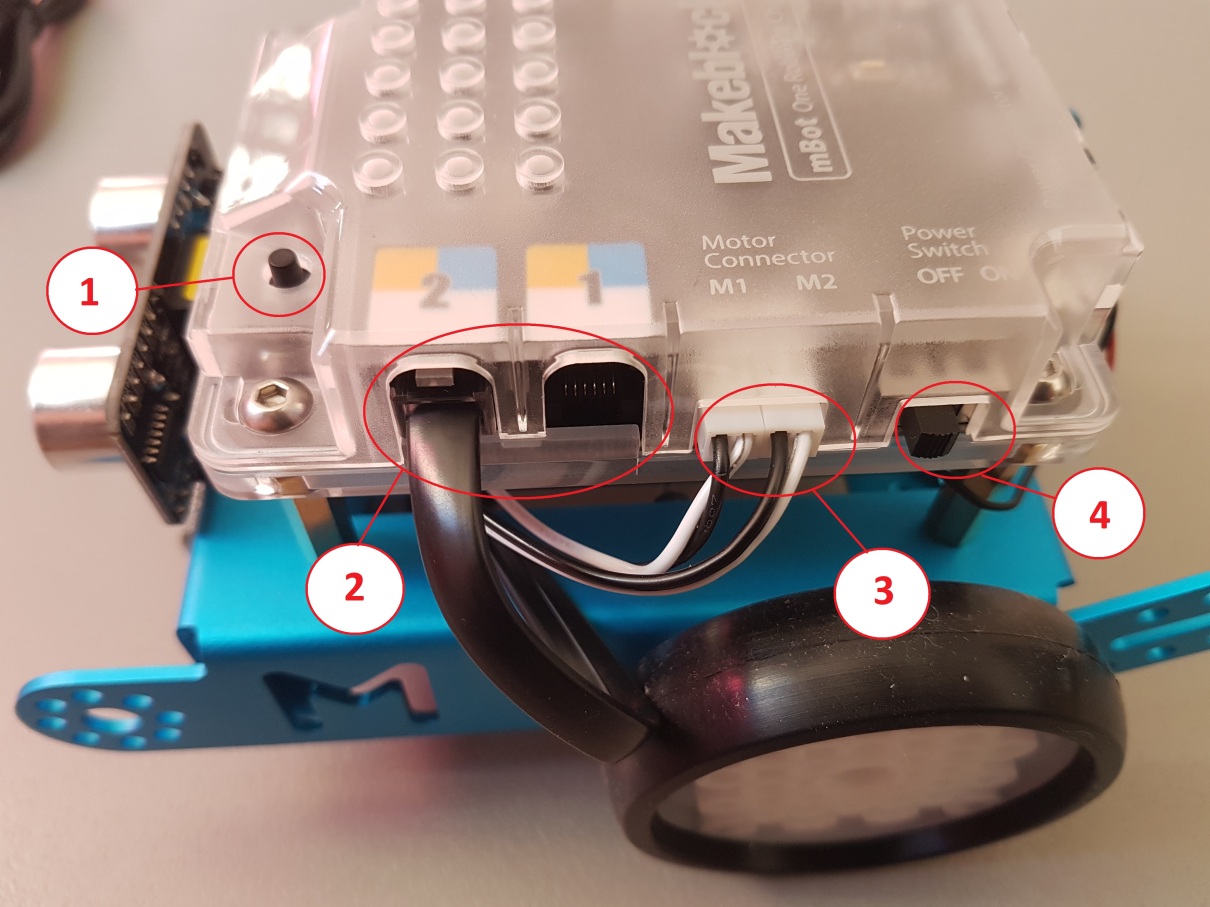
Sur le côté gauche :
1- Bouton pour changer de mode
2- 2 ports RJ25 (n°1 disponible pour un autre module et le n°2, utilisé pour le capteur suiveur de ligne)
3- 2 connecteurs pour les moto-réducteurs présents sous le châssis
4- interrupteur On/Off
Complément :
Les couleurs présentes sur le dessus des ports RJ25 permettent d'identifier les modules possibles à connecter.
Ces modules sont disponibles sur le site : http://learn.makeblock.com/en/electronics/
Les capteurs
Les photo-transistors sont placés sous le robot pour permettre la fonction "suiveur de ligne".

Un capteur à ultra-son pour détecter les obstacles.

L'alimentation
Dans notre cas, une batterie est fixée sous la carte électronique par un système de ruban auto-agrippant.
Elle se recharge avec le câble USB fourni avec le robot.
